Mobile Manipulation Capstone
Overview
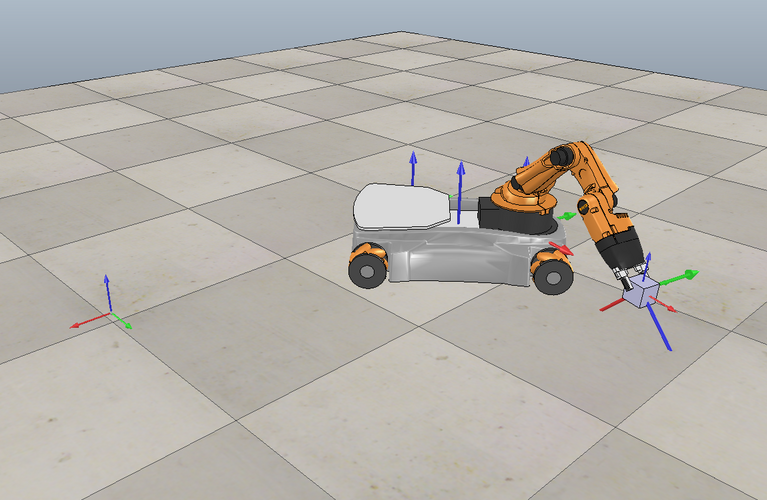
Developed a full planning and control system for a simulated youBot mobile manipulator. The robot autonomously executed a pick-and-place task by integrating kinematics, trajectory generation, and feedback control.
How It Works
Kinematics & State Propagation: Implemented odometry and joint updates with speed constraints.
Trajectory Generation: Designed smooth, time-parameterized end-effector motions for pick-and-place.
Feedback Control: Combined feedforward twists with proportional–integral pose error correction using the system Jacobian.
Simulation: Logged configurations and errors to run in CoppeliaSim, validating accurate task completion.
Impact
Demonstrated skills in robotics kinematics, control, and simulation while delivering a complete, functioning mobile manipulation system.
Mobile Manipulation Report
Program Components
Wrapper (click to expand)
%% General
clear all
clc
close all
warning('off','all')
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%This code takes the initial inputs of joint angles, joint velocities, all
%fixed configuration (T) matrices, and control variables and generates a
%controlled trajectory for a pick and place UR5 robot.
%Using the input fixed configuration matrices, the desired trajectory is generated.
%Then, using forward kinematics and other fixed configuration
%matrices, the actual current initial configuration is calculated. Both are
%fed into the loop.
% In the loop, the current desired and next desired T matrices, feed into FeedbackControl
%along with actual current Tse matrix, arm joint angles, and controllers to get current
%error twist and joint velocities. Desired values are stored for plotting.
%It then takes current joint velocities and angles and feeds them into NextState to
%get out the current state of the robot. Using the current state, the
%new Tse configuration is calculated and fed back into FeedbackControl
%to restart the loop. This carries on until all trajectories have run
%through the loop.
%Running the Final.csv file in the CoppeliaSim Scene 6 will produce the
%desired pick and place task for any given block location.
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% Initialization - Input Values Here
% Next state Initialization
%arm joint angles
a_angles = [0 .2 -1.9 -0.5 0];
%chassis position and angle
c_angles = [0 0 0];
%wheel angles
w_angles = [0 0 0 0];
%arm joint velocities
a_velocities = [0 0 0 0 0];
%wheel velocities
w_velocities = [0 0 0 0];
%max joint speed
vmax = 4*100;
% TrajectoryGenerator Initialization
% Constant T between {b} and {0}
Tb0=[1 0 0 .1662;...
0 1 0 0;...
0 0 1 .0026;...
0 0 0 1];
% e-e zero position
M0e=[1 0 0 0.033 ;...
0 1 0 0 ;...
0 0 1 0.6546;...
0 0 0 1 ];
% Arm joint screw axes in {B} frame
Blist = [[0 0 1 0 .033 0]'...
[0 -1 0 -.5076 0 0]'...
[0 -1 0 -.3526 0 0]' ...
[0 -1 0 -.2176 0 0]' ...
[0 0 1 0 0 0]'];
% Desired e-e starting config
Tse_d= [ 0 0 1 0;...
0 1 0 0;...
-1 0 0 0.5;...
0 0 0 1];
% Initial cube config.
Tsc_i=[1 0 0 .75;...
0 1 0 .25;...
0 0 1 0.025;...
0 0 0 1];
% Final cube config.
Tsc_f=[0 1 0 0;...
-1 0 0 -2;...
0 0 1 .025;...
0 0 0 1];
% e-e Gripping config.
Tce_g = [cosd(135) 0 sind(135) 0;...
0 1 0 0;...
-sind(135) 0 cosd(135) 0;...
0 0 0 1];
% e-e Standoff Config.
Tce_sf=[cosd(135) 0 sind(135) 0;...
0 1 0 0;...
-sind(135) 0 cosd(135) .1;...
0 0 0 1];
% Number of trajectory reference configs per 0.01s
k = 10;
% FeedbackControl Initialization
% Proportional control matrix
Kp = 6*eye(6,6);
% Integral control matrix
Ki = .15*eye(6,6);
% Time step
dt = 0.01;
% Initialize integral error
Xerr_i=[0 0 0 0 0 0]';
%% Initial Calculations
% Generate entire desired trajectory
N_states = TrajectoryGenerator(Tse_d,Tsc_i,Tsc_f,Tce_g,Tce_sf,k);
%Looping though N ref configurations
N=size(N_states,1);
%Calculate Initial e-e location/orientation
% forward kinematics to find Toe
Toe = FKinBody(M0e,Blist,a_angles');
% chassis angles to fid Tsb
phi=c_angles(1);
Tsb= [cos(phi) -sin(phi) 0 c_angles(2);...
sin(phi) cos(phi) 0 c_angles(3);...
0 0 1 .0963 ;...
0 0 0 1 ];
%matrix multiplication to find Tse initial
Tse=Tsb*Tb0*Toe;
%% Start of The Loop
for i= 1:N-1
% Desired Trajectory - current
Tse_d =[N_states(i,1:3) N_states(i,10);...
N_states(i,4:6) N_states(i,11);...
N_states(i,7:9) N_states(i,12);...
zeros(1,3) 1 ];
% Desired Trajectory - next
Tse_d_n =[N_states(i+1,1:3) N_states(i+1,10);...
N_states(i+1,4:6) N_states(i+1,11);...
N_states(i+1,7:9) N_states(i+1,12);...
zeros(1,3) 1 ];
% Desired gripper state
g_state = N_states(i,13);
% Input desired state - output twist
[twist, w_velocities, a_velocities, Xerr_i,Xerr,Vd,mu_w,mu_v] = FeedbackControl(Tse,Tse_d,Tse_d_n,Kp,Ki,dt,Xerr_i,w_angles',a_angles);
% Store error for plotting
Xerr_is(:,i)=Xerr_i;
Xerr_s(:,i) = Xerr;
Vd_s(:,i) = Vd;
twist_s(:,i) = twist;
Tse_d_s(:,:,i) = Tse_d;
Tse_s(:,:,i) = Tse;
mu_w_s(i) = mu_w;
mu_v_s(i) = mu_v;
% generate new state with updated twist
state(i,:) = NextState(c_angles,a_angles,w_angles,a_velocities,w_velocities,dt,vmax,g_state);
c_angles=state(i,1:3);
a_angles=state(i,4:8);
w_angles=state(i,9:12);
% Calcualte new Tse using updated state
Toe = FKinBody(M0e,Blist,a_angles');
phi=c_angles(1);
Tsb= [cos(phi) -sin(phi) 0 c_angles(2);...
sin(phi) cos(phi) 0 c_angles(3);...
0 0 1 .0963 ;...
0 0 0 1 ];
Tse=Tsb*Tb0*Toe;
end
state;
csvwrite('Final.csv',state)
%% Plots - Error Twist vs. time, Manipulability Factors (w,v) vs. time, Desired/Actual Tse vs. time
time = linspace(0,15,length(state));
% Error Twist vs. time
figure(2)
subplot(2,2,1:2)
title('Error Twist')
hold on
grid on
plot(time,Xerr_s(1,:))
plot(time,Xerr_s(2,:))
plot(time,Xerr_s(3,:))
plot(time,Xerr_s(4,:))
plot(time,Xerr_s(5,:))
plot(time,Xerr_s(6,:))
xlabel('Time of Simulation [s]')
ylabel('Error Twist')
legend('wx','wy','wz','vx','vy','vz')
%Manipulability Factors (w,v) vs. time
hold on
subplot(2,2,3)
plot(time, mu_w_s)
grid on
title('Rotational Manipulability mu_1(A_w)')
xlabel('Time of Simulation [s]')
subplot(2,2,4)
plot(time, mu_v_s)
grid on
title('Translational Manipulability mu_1(A_v)')
xlabel('Time of Simulation [s]')
% Desired/Actual Tse vs. time
figure(4)
hold on
% Subplot 1 of 3
subplot(1,3,1)
hold on
grid on
plot(time,squeeze(Tse_d_s(1,4,:)))
title('Desired X-position of e-e')
plot(time,squeeze(Tse_s(1,4,:)))
title('Actual X-position of e-e')
legend('Desired','Actual')
hold off
% Subplot 2 of 3
subplot(1,3,2)
hold on
grid on
plot(time,squeeze(Tse_d_s(2,4,:)))
title('Desired Y-position of e-e')
plot(time,squeeze(Tse_s(2,4,:)))
title('Actual Y-position of e-e')
legend('Desired','Actual')
hold off
% Subplot 3 of 3
subplot(1,3,3)
hold on
grid on
plot(time,squeeze(Tse_d_s(3,4,:)))
title('Desired Z-position of e-e')
plot(time,squeeze(Tse_s(3,4,:)))
title('Actual Z-position of e-e')
legend('Desired','Actual')
hold off
Function 1: Next State (click to expand)
%% 1 - Kinematics Simulator
% uses the kinematics of the youBot to predict how the robot will move in a small timestep given
% its current configuration and velocity.
% Inputs:
% • The current state of the robot (12 variables: 3 for chassis, 5 for arm, 4 for wheel angles)
% • The joint and wheel velocities (9 variables: 5 for arm ˙θ, 4 for wheels u)
% • The timestep size ∆t (1 parameter)
% • The maximum joint and wheel velocity magnitude (1 parameter)
% Outputs
% • The next state (configuration) of the robot (12 variables)
function state = NextState(c_angles,a_angles,w_angles,a_velocities,w_velocities,dt,vmax,g_state)
%checking for maximum velocity
for b=1:length(a_velocities)
if a_velocities(b)>=vmax || a_velocities(b)<=-vmax
a_velocities(b) = vmax;
elseif a_velocities(b)<=-vmax
a_velocities(b) = -vmax;
end
end
for c=1:length(w_velocities)
if w_velocities(c)>=vmax
w_velocities(c) = vmax;
elseif w_velocities(c)<=-vmax
w_velocities(c)=-vmax;
end
end
%euler step for arm and wheel angles
a_angles_n = a_angles + a_velocities*dt;
w_angles_n = w_angles + w_velocities*dt;
%euler step for chassis config
%odometry
r = 0.0475; %m
l = 0.47/2; %m
w = 0.3/2; %m
F = r/4*[-1/(l+w) 1/(l+w) 1/(l+w) -1/(l+w);
1 1 1 1 ;
-1 1 -1 1 ];
d_theta = w_velocities*dt;
Vb = zeros(1,6)';
Vb_i = F*d_theta';
Vb(3) = Vb_i(1);
Vb(4) = Vb_i(2);
Vb(5) = Vb_i(3);
% conditional for wbz = 0
if abs(Vb(3)) <= 1E-3
d_qb = [ 0 ;...
Vb(4) ;...
Vb(5)];
else
d_qb = [ Vb(3) ;...
(Vb(4)*sin(Vb(3)) + Vb(5)*(cos(Vb(3) -1)))/Vb(3) ;...
(Vb(5)*sin(Vb(3)) + Vb(4)*(1 - cos(Vb(3))))/Vb(3)];
end
phi_k = c_angles(1);
dq = [1 0 0 ;
0 cos(phi_k) -sin(phi_k) ;
0 sin(phi_k) cos(phi_k) ] * d_qb;
c_angles_n = c_angles + dq';
%updated states
state = [c_angles_n a_angles_n w_angles_n g_state];
end
Function 2: Trajectory Generator (click to expand)
%% 2 -TrajectoryGenerator to create the reference (desired) trajectory for the end-effector frame {e}.
% Inputs
% • The initial configuration of the end-effector: Tse,initial
% • The initial configuration of the cube: Tsc,initial
% • The desired final configuration of the cube: Tsc,f inal
% • The configuration of the end-effector relative to the cube while grasping: Tce,grasp
% • The standoff configuration of the end-effector above the cube, before and after grasping, relative to the cube:
% Tce,standof f
% • The number of trajectory reference configurations per 0.01 seconds: k. The value k is an integer with a value
% of 1 or greater. 1
% Outputs
% • A representation of the N configurations of the end-effector along the entire concatenated eight-segment reference trajectory. Each of these N reference points represents a transformation matrix Tse of the end-effector
% frame {e} relative to {s} at an instant in time, plus the gripper state (0 for open or 1 for closed). These
% reference configurations will be used by your controller. Note: if your trajectory takes t seconds, your function
% should generate N = t · k/0.01 configurations.
% • A .csv file with the entire eight-segment reference trajectory. Each line of the .csv file corresponds to one
% configuration Tse of the end-effector, expressed as 13 variables separated by commas. The 13 variables are, in
% order:
% r11, r12, r13, r21, r22, r23, r31, r32, r33, px, py, pz, gripper state
function Configurations = TrajectoryGenerator(Tse_d,Tsc_i,Tsc_f,Tce_g,Tce_sf,k)
%Trajectory Selections
method=5;%(3 for cubic, 5 for quintic)
t_l=6;%seconds large movement takes
t_s=.75;%seconds small movement takes
N_l=t_l*k/.01;%number of large movement
N_s=t_s*k/.01;%number of small movement
% 1 - gripper initial position to standoff initial open
traj_1 = ScrewTrajectory(Tse_d,Tsc_i*Tce_sf,t_l,N_l,method);
% 2 - standoff initial open to grip open
traj_2 = ScrewTrajectory(Tsc_i*Tce_sf,Tsc_i*Tce_g,t_s,N_s,method);
% 4 - grip close to standoff initial
traj_4 = ScrewTrajectory(Tsc_i*Tce_g,Tsc_i*Tce_sf,t_s,N_s,method);
% 5 - standoff initial close to standoff close final
traj_5 = ScrewTrajectory(Tsc_i*Tce_sf,Tsc_f*Tce_sf,t_l,N_l,method);
% 6 - standoff final close to grip close
traj_6 = ScrewTrajectory(Tsc_f*Tce_sf,Tsc_f*Tce_g,t_s,N_s,method);
% 8 - grip 2 open to standoff 2 open
traj_8 = ScrewTrajectory(Tsc_f*Tce_g,Tsc_f*Tce_sf,t_s,N_s,method);
for i = 1:N_l
%1 - gripper initial position to standoff 1 open
step1 = traj_1{1,i};
traj1(i,:) = [step1(1,1:3) step1(2,1:3) step1(3,1:3) step1(1:3,4)' 0];
%5 - standoff 1 close to standoff 2 close
step5 = traj_5{1,i};
traj5(i,:) = [step5(1,1:3) step5(2,1:3) step5(3,1:3) step5(1:3,4)' 1];
end
for i = 1:N_s
%2 - standoff 1 open to grip open
step2 = traj_2{1,i};
traj2(i,:) = [step2(1,1:3) step2(2,1:3) step2(3,1:3) step2(1:3,4)' 0];
%4 - grip close to standoff 1 close
step4 = traj_4{1,i};
traj4(i,:) = [step4(1,1:3) step4(2,1:3) step4(3,1:3) step4(1:3,4)' 1];
%6 - standoff 2 close to grip 2 close
step6 = traj_6{1,i};
traj6(i,:) = [step6(1,1:3) step6(2,1:3) step6(3,1:3) step6(1:3,4)' 1];
%8 - grip 2 open to standoff 2 open
step8 = traj_8{1,i};
traj8(i,:) = [step8(1,1:3) step8(2,1:3) step8(3,1:3) step8(1:3,4)' 0];
%3 - grip open to grip close
end
traj3(1,:) = [step2(1,1:3) step2(2,1:3) step2(3,1:3) step2(1:3,4)' 1];
%7 - grip 2 close to grip 2 open
traj7(1,:) = [step6(1,1:3) step6(2,1:3) step6(3,1:3) step6(1:3,4)' 0];
Configurations = [traj1; traj2; traj3; traj4; traj5; traj6; traj7; traj8];
csvwrite('test_part_2',Configurations)
Function 3: Feedback Control (click to expand)
%% 3 - FeedbackControl calculates the task-space feedforward plus feedback control law discussed in class
% Inputs
% • The current actual end-effector configuration X (aka Tse)
% • The current reference end-effector configuration Xd (aka Tse,d)
% • The reference end-effector configuration at the next timestep, Xd,next (aka Tse,d,next)
% • The PI gain matrices Kp and Ki
% • The timestep ∆t between reference trajectory configurations
% Outputs
% • The commanded end-effector twist V expressed in the end-effector frame {e} (for plotting purposes).
% • The commanded wheel speeds, u and the commanded arm joint speeds, ˙θ
function [twist, w_velocities, a_velocities,Xerr_i,Xerr,Vd,mu_w,mu_v] = FeedbackControl(Tse,Tse_d,Tse_d_n,Kp,Ki,dt,Xerr_i,w_angles ,a_angles)
%adjoint
adj = Adjoint(TransInv(Tse)*Tse_d);
%error twist
Xerr = se3ToVec(MatrixLog6(TransInv(Tse)*Tse_d));
%integral error
Xerr_i= Xerr*dt + Xerr_i;
%desired twist
Vd = se3ToVec(1/dt*MatrixLog6(TransInv(Tse_d)*Tse_d_n));
%updated twist
V = adj*Vd + Kp*Xerr + Ki*Xerr_i;
%Jacobian
% arm Jacobian
thetalist = a_angles';
Blist = [[0 0 1 0 .033 0]' ...
[0 -1 0 -.5076 0 0]' ...
[0 -1 0 -.3526 0 0]' ...
[0 -1 0 -.2176 0 0]' ...
[0 0 1 0 0 0]'];
J_arm = JacobianBody(Blist,thetalist);
% base Jacobian
Tb0 = [1 0 0 .1662 ;...
0 1 0 0 ;...
0 0 1 0.0026;...
0 0 0 1 ];
M0e = [1 0 0 0.033 ;...
0 1 0 0 ;...
0 0 1 0.6546;...
0 0 0 1 ];
Toe_theta=FKinBody(M0e,Blist,thetalist);
adj2 = Adjoint(TransInv(Toe_theta)*TransInv(Tb0));
r = 0.0475; l = 0.47/2; w = 0.3/2; %m
F = r/4*[-1/(l+w) 1/(l+w) 1/(l+w) -1/(l+w);...
1 1 1 1 ;...
-1 1 -1 1 ];...
F6 = [zeros(1,length(F));...
zeros(1,length(F));...
F;...
zeros(1,length(F))];
J_base = adj2*F6;
J = [J_base J_arm];
%manipulability values
Jw = J(1:3,:);
Aw = Jw*Jw';
lw = eig(Aw);
lw_max = max(lw);
lw_min = min(lw);
mu_w = sqrt(lw_max)/sqrt(lw_min);
Jv = J(4:6,:);
Av = Jv*Jv';
lv = eig(Av);
lv_max = max(lv);
lv_min = min(lv);
mu_v = sqrt(lv_max)/sqrt(lv_min);
% velocities
vel = pinv(J,.0001)*V;
twist=V;
w_velocities=vel(1:4)';
a_velocities=vel(5:9)';
end